Polynomial Fitting
Goal
Since an image is a discrete mapping of pixels, while the real world is "continuous", we want to fit the pixels by a continuous functions so that we can extract information.
Sliding Window Algorithm
- Define a "pixel window" centered at pixel \((x, y)\) so that an 1D patch can be \((0, y)\sim (2x,y)\)
- Fit a n-degree polynomial to the intensities (commonly \(n \leq 2\))
- Assign the poly's derivatives at \(x=0\) to pixel at windows's center
- Slide window one pixel over until window reaches border
Taylor-series Approximation of Images
Consider a 1D patch from \((0,y)\) to \((2x,y)\)
Consider the Taylor expansion of \(I\) centered at \(0\)
Thus, we can write it as
Note that we have \(2x+1\) pixels in the patch, ranges from \(-x\) to \(x\), let their intensities be \(I_x\). So that we have
where \(I, X\) are known and we want to solve \(d\)
Since this is not always have a solution. We want to minimize the "fit error" \(\|I-Xd\|^2 = \sqrt{\sum^n I_i^2}\)
When \(n = 0\), obviously \(d\) is minimized at mean, i.e. \(\sum^{2x+1} I_i / (2x+1)\)
Weighted least square estimation
If we want to extract more information, or in favor of, the neighboring points, we can have \(I' = \Omega I\) where \(\Omega\) is the weight function.
In 1-D case, let \(\Omega = diag(\omega_1, ..., \omega_{2x+1})\), we want to solve \(\Omega I = \Omega X d\) which is to minimize \(\|\Omega(I-Xd)\|^2\)
Random Sample Consensus (RANSAC)
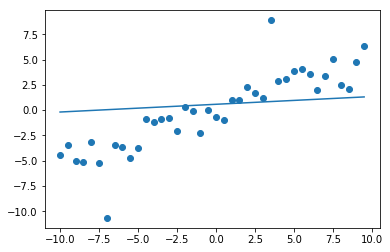
Suppose we have some outliers, then the line fitting with least square is not a good solution.
x = np.arange(-10, 10, 0.5)
y = x * 0.5 + np.random.normal(0, 1, x.shape)
y += (np.random.randn(y.shape[0]) < -1.5) * 8
y -= (np.random.randn(y.shape[0]) < -1.5) * 8
fit = np.polyfit(x, y, 1)
f = fit[0] + fit[1] * x
plt.scatter(x, y)
plt.plot(x, f);
Algorithm
Given:
\(n=\) degree of freedom (unkonwn polynomial coefficients)
\(p=\) fraction of inliers
$t = $ fit threshold
$P_s = $ success probability
\(K=\) max number of iterations
for _ in K:
randomly choose n + 1 pixels
fit a n-degree polynomial
count pixels whose vertical distance from poly is < t
if there are >= (2w+1) * p pixels, mark them as inliers:
do n-degree poly fitting on inliers
return the fitting
# if there is insufficient inliers
return None
Consider the value for \(K\):
Suppose inliers are independent distributed, hence
2D Image Patch
Given an image patch \(I(1:W, 1:H), I\in[0,1]\) is the intensity mapping
2D Taylor Series Expansion
Let \(I(0,0)\) be the center
Directional Derivative
Using 1st order Taylor series approximation.
Let \(\theta\) be the direction, \(v=(\cos \theta, \sin\theta)\) be the unit vector in direction \(\theta\).
Consider the points \((t\cos\theta, t\sin\theta)\), i.e. \(t\) units away from \((0,0)\) in the direction of \(\theta\)
Then consider the directional derivative
Let \(\nabla I = (\partial_xI, \partial_yI)\). Note that
Therefore, the gradient \(\nabla I\) tells the direction and magnitude of max changes in intensity.
Discrete Derivative
Noting that the image are pixels, hence we can approximate the derivative by its limit definition.
Or we can use forward difference \((x+1, x)\) or backward difference \((x,x-1)\) vs. \((x-1,x+1)/2\)
Magnitude \(\|\nabla I(x,y)\| = \sqrt{\partial_xI(x,y)^2 + \partial_yI(x,y)^2}\) is the \(L_2\) norm
Direction \(\Theta(x,y) = \arctan(\partial_xI / \partial_yI)\)
Laplacian
Based on central difference, the approximation to the laplacian of \(I\) is
For 2D functions,
Hence