Homography - Basics and Camera Model
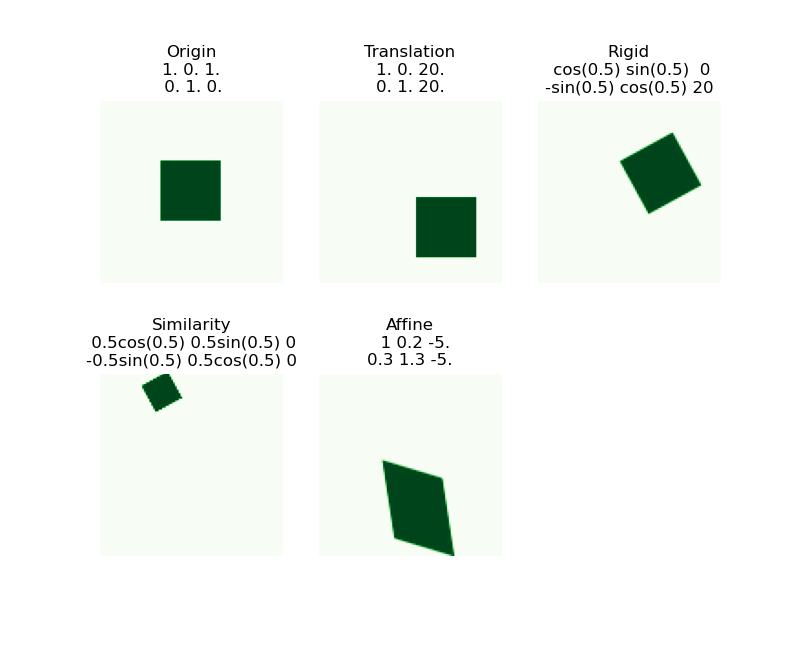
Affine Transformations
is the combination of a linear transformation \(\begin{bmatrix}a&b\\c&d\end{bmatrix}\) plus a translation $\begin{bmatrix}e\f\end{bmatrix} $
Properties
- Origin \(\Rightarrow (e, f)\)
- Lines map to lines
- Parallel lines remain parallel
- Preserves ratios
- Closed under composition
- Rectangles go to parallelograms
Projective Transformations
Note that this is an expansion of affine transformation, when \(g=h=0\) and \(i=1\)
Properties
- origin does not necessarily map to origin
- Lines map to lines
- parallel are not necessarily remain parallel
- Do not preserve ratios
- closed under composition
- rectangles goes to quadrilateral
Solving Homographies
Let \((x_i,y_i)\) be a point on the reference (model) image, and \((x_i',y_i')\) be its matching in the test image, \(H_{3\times 3}\) be the projective matrix. So that
We need to solve the 9 unknowns \(h_{[0:2, 0:2]}\) First, note that
rewrite them as linear equations
where \(h_F=[h_{00}, h_{01},...,h_{21},h_{22}]^T\) is the flatten vector of \(H\)
Since we have \(n\) sets of matching points, we can have
and we want to find
Since \(h\) is only defined up to scale, we can first solve for unit vector and then multiply back scale. so that we can add constraint \(\|h\|_2 = 1\) and
For constrained optimization, we use method of Lagrange Multipliers where $\hat h = $eigenvector of \(A^TA\) with smallest eigenvalue.
Notice that although we seem to have \(9\) unknowns, we actually only have \(8\), since the last one is calculated from the constraint. So that we only need \(4\) matching to form a deterministic or over-deterministic system.
Camera Modeling Projection
Set up
To simplify the model, assume we have a pinhole camera, and we are working with the virtual image plane, since the real image plane is upside down.
For the 3-D coordinate system, using the right handed coordinate system
call the optical center or cemera center \(C:= (0,0)\)
\(Z\) axis be the optical or principal axis, which will be orthogonal to the image plane.
\(X,Y\) axes are parallel to the image.
So that \(Z\)-axis points to the object, \(X\)-axis points away and \(Y\)-axis points top.
principal point \(p\): the optical axis intersects the image plane.
focal length \(f:=d(C,p)\) is the distance from the camera center to the principal point.
image coordinate system the \((x,y)\) coordinate used to represent the 2D image plane. Let the origin be the bottom left corner, so that \(p=(p_x,p_y)\)
Taking some point \(Q\) living in the 3D, connected to the origin, call the connection line projection line. Call its intersection with the image plane \(q\). However, we can notice that every point on the projection line will be mapped to \(q\) in the 2D image.
Equations
Consider the point \(Q = (X,Y,Z)^T\), then its corresponding projection point \(q=(X\frac{f}{Z}, Y\frac{f}{Z},f)\) using similar triangles. In the 2D projection space, \(q = p + (X\frac{f}{Z}, Y\frac{f}{Z}) = (X\frac{f}{Z} + p_x, Y\frac{f}{Z}+p_y)\)
Homogeneous Coordinates
Add a \(1\) for the vector, e.g. \((x,y)\Rightarrow [x,y,1]^T\). In homogeneous coordinates, scaling doesn't affect anything. i.e. \([x,y,1]^T \sim [wx,wy,w]^T\). Therefore, we can write \(q\) as
Then, the mapping from \(Q\) to \(q\) is
\(K\) is the camera calibration matrix or intrinsic parameter matrix. The parameters in \(K\) are called internal camera parameters.
Some properties
- Many to one: any points along same ray map to same point
- Points, lines, and planes are preserved
- Any line through principal point projects to a point
- Any plane through principal point projects to line
Vanishing points
All lines in the same direction in 3D will intersect at the same vanishing point in 2D.
Consider a line that pass through \(V\) with direction \(D\), i.e. the line \(X = V+tD\)
so that the project point \((x, y)\) will be \((x,y) = \lim_{t\rightarrow\infty} (\frac{fV_x+ftD_x + p_xV_z + tp_xD_z}{V_z + tD_z}, \frac{fV_y+ftD_y + p_yV_z + tp_yD_z}{V_z + tD_z}) = (\frac{fD_x + p_xD_z}{D_z}, \frac{fD_y+p_yD_z}{D_z})\) is only about \(D\) and independent of \(V\).
However, lines parallel to image plane are still parallel, we say that they intersect at infinity. Consider \(X_1,X_2\) be two line parallel to the image plane, i.e. \(V_z = 0, D_{1z}=D_{2z}\) so that the distance (only demonstrate \(x\)-distance)
Example
Suppose we have a photo taken from a car with a camera on top, and we know the camera intrinsic matrix \(K\), WTF the incline of the hill \(\theta\).
Since the vertical lines now is not parallel to the image plane (the image plane is perpendicular to the inclined ground), we can find the vanishing points in these 2D lines, which is \([w\cdot vp_x, w\cdot vp_y, w]^T\). Therefore,
Then, we can find \(D\) and normalizes it.
Vanishing Line
Parallel lines in 3D projects to intersected lines in 2D. However, the converse is not necessarily true.
For lines on the same 3D plane, the vanishing points lie on a line, i.e. vanishing line. The ground plane is the horizon line.
Parallel plnes in 3D the the same horizon line in the image.
Camera Coordinate System
Since we are measuring everything from 2D images taken by the camera, we need to project the 3D points onto our camera coordinate system, so that we can describe them and get them back.
To do such projection, we need - Camera position \(c\) (in world coordinates) - Camera orientation \((\vec u,\vec v,\vec w)\) (in world coordinates) - \(K\)
So that for point \(Q\) in the world coordinates,
\(Q-c\) is the projection in the camera coordinates,
\(R\begin{bmatrix}u&v&w\end{bmatrix}=I\) looking for rotation to canonical orientation. Then, because orientation is orthogonal, \(RR^T = I\Rightarrow R = \begin{bmatrix}u^T&v^T&w^T\end{bmatrix}\)
Therefore, the camera coordinate for \((x,y,z)\) in world coordinate is
Projection Matrix
We can describe all the cumulative effect of all intrinsic and extrinsic parameters using the projection matrix \(P\). so that the 2D projection \((x,y)\) from \((x,y,z)\) can be described through homogeneous coordinates
Where to get a point \(q\) in the image plane, we need to compute \(P[x,y,z,1]^T\), and divide all coordinates with the third coordinate, and drop the last coordinate.
Sometimes we use more compact form,