Registration
Problem
When we scan a rigid object, we should have multiple scans from different positions and angles. However, if we don't match/align these scans, they are just multiple partial scans. Therefore, we need some way to register these points, i.e. find a spatial transformation that maps one scan to the alignment of the other.
Another possible case is that we can have a coarse scan of a person and a finer scan of the face. We need to register the face.
We start with a complete scan of the surface \(Y\) and a new partial scan of the surface \(X\), both of them are which triangle meshes, they may not have the same number of vertices or even the same topology.
Hausdorff Distance
To measure the performance of the matching, we need a single scalar number, i.e. distance.
Point-Point Distance
We can start with point to point Euclidean distance, for points \(x, y\), let
Point-Projection Distance
Then, consider the distance between a point \(x\) and some large object \(Y\), let
Directed Hausdorff Distance
Let the directed Hausdorff distance be
where \(P_Y(x)\) is the closest-point projection from \(x\) to \(Y\).
Note that we use supremum, which means the worst projection is at most this distance.
Also, note that this distance is "directed", i.e. \(D_{\vec H}(X,Y) \neq D_{\vec H}(Y, X)\).
DHD Between Triangle Meshes
Since we have the two triangle Meshes, we can approximate a lower bound on the Hausdorff distance by densely sampling surfaces \(X\) as \(\mathcal P_X\). Obviously,
And as we have more samples, it's more likely to approach the true distance.
However, note that the \(\max\) function is not continuous, hence hard to optimize.
Random Sampling of a Mesh
We want our random variable \(x\in X\) to have a uniform density \(f=A_X^{-1}\), where \(A_X\) is the surface area of \(X\). Therefore, we break the steps into randomly sample individual triangle, and then sample point from that triangle.
Let \(h(T) = \frac{A_T}{A_x}\) be the uniform distribution over triangle index \(T\in\{1,...,m\}\), \(g_T(x) = A_T^{-1}\) be the uniform distribution over the triangle \(T\), then
Uniform random sampling of a single triangle.
Let \(v_1,v_2, v_3\) be the corners of the triangle, first pick a point uniformly in the parallelogram form by reflecting \(v_1\) across the line \(\overline{v_2v_3}\). Then, randomly sample \(a_1, a_2 \in [0, 1]\)
In case 2, we sampled a point in the reflection part of the triangle, hence we reflect it back by \(1-a\)
Area-weighted Random Sampling of Triangles
Let \(\mathcal C_i = \sum^i_{j=1}\frac{A_j}{A_X}\) be the cumsum of the relative areas. Then we randomly sample \(a\in [0, 1]\) and locate the index of \(a\) in that cumsum interval.
Integrated Closest-Point Distance
To enable optimization, we replace the sup norm with the euclidean norm, i.e.
So that we can define the directed matching energy from \(Z\) to \(Y\) as
Consider the function \(f_Y(z) = z - P_Y(z)\). if \(P_Y(z)\) is a point, that \(f(z) = z-y\) is linear, and if \(Y = \{y\mid (y-p)\cdot n = 0\}\) is a infinite plane, then \(f_Y(z) = ((z-p)\cdot n)n\) is also linear. However, due to "smallest" distance, the linearity does not hold and \(f_Y\) may not even be continuous.
However, if we fix some \(z_0\) s.t. \(f(z) = z-P_Y(z_0)\), since \(z_0\) is fixed, and \(P_Y(z_0)\) is a point. the function can be optimized, takes one step further, we can do \(f_Y(z) = ((z-P_Y(z_0))\cdot n)n\), which also can be optimized. Therefore, we can have an iterative algorithm
ICP: Iterative Closest Point Algorithm
Go back to the original problem, our task is to find a rigid transformation \(T\)
where \(R\in SO(3)\) is the rotation matrix and \(t\in\mathbb R^3\) is the translation vector, and our problem is to
which, as we sampled points on \(X\), is approximated as
Procedure
The procedure can be described as below
# init R, t, possibly as identity and zero vector
R = identity(3)
t = [0, 0, 0]
while not converge:
X_points = sample from V_X F_X
proj = project all X_points onto V_Y F_Y
R, t = update rigid transformation from best matched X_points and proj
V_X = R(V_X) + t
Then, we have to consider the methods fro the rigid transformation update. As from previous discussions, we can do point-to-point or point-to-plane.
Point-Point Rigid Matching
We are trying to solve
The energy is quadratic in \(t\), so that the optimal \(t^*\) can be obtained by (with unknown \(R\))
where \(X_{k\times 3}, P_{k\times 3}\) are \(x_i, p_i\) stacked vertically, and \(\vec 1_{k\times 1}\) is the vector filled with 1's. \(\|\cdot\|_F\) is the Frebenius norm, which is the sum of squared elements. \(\bar p = k^{-1}\sum^k p_i, \bar x = k^{-1}\sum^k x_i\) is the mean of all points.
Then, replace \(t = \bar p - R\bar x\), the problem becomes
where \(\bar X_{k\times 3}, \bar P_{k\times 3}\) are \(x_i-\bar x, p_i - \bar p\) stacked vertically.
Then,
Closest Rotation Matrix
Using SVD, we can have \(\bar P^T\bar X = U\Sigma V^T\), so that with permutation property of F-norm again
Let \(\Omega = U^TRV\) with \(\det \Omega = \det UV^T\), since \(U,V\) are orthonormal, \(\Omega^T = \Omega^{-1}\). This implies that \(R^* = U\Omega^*V^T\), where
so that \(\det R^* = 1\).
Because \(\Omega\) is orthonormal, each col and row must have unit norm. Placing a non-zero on the off-diagonal will get "killed" when multiplied by the corresponding zero in \(\Sigma\). So the optimal choice is to set all values 0, except the diagonal. The best choice is
so that \(\det UV^T\) is multiplied with the smallest \(\sigma\). finally the closest rotation matrix is obtained as
Point to Plane Rigid Matching
We are trying to solve
where \(\hat n_i\) is the unit normal at the located closest point \(p_i\). The problem can be simplified a bit as
To optimize \(R\), we linearize the constraint that \(R\) stays a rotation matrix and work with a reduced set of variables. Any rotation matrix can be written as scalar rotation angle \(\theta\) around a rotation axis defined by a unit vector \(\hat w\), generally, given the rotation axis, the axis-angle to matrix formula gives
where \(W\) is the skew symmetric cross product matrix
In this form, we can linearize by considering a small change in \(\theta\) and \(\hat w\), as
introducing \(a = \theta \hat w\), the problem becomes
and let \(u = \begin{bmatrix}a\\t\end{bmatrix}\),
Then, let \(c_i = \begin{bmatrix}(x_i\times \hat n_i)^T &\hat n_i^T\end{bmatrix}, d_i = \hat n_i^T (p_i - x_i)\), the equation above is expanded as
where \(A = \sum^k c_i^Tc_i, b = \sum^kc_i^Td_i\)
Therefore, \([a^*, t^*] = u^* = A^{-1}b\), as we considering \(A\) as a sum of \(c_i\), which is convex and separable. Then, we have \(a^* = \underset{\theta}{\|a^*\|}\underset{\hat w}{\frac{a^*}{\|a^*\|}}\), and we can find
Some Additional Pieces
Uniform random sampling of a triangle mesh
To uniform sampling a mesh \(X\), the pdf will be
we can then have two independent uniform random sampling, first, sample a triangle from \(T=\{1,2,...,m\}\) of the mesh, which \(h_i = \frac{A_i}{A_X}\) and then for each triangle, sample from \(g_i(x) = A^{-1}_i\), so that
Consider \(g_T\), a triangle can be written as parametric function \(T(s, t) = a + s(b-a) + t(c-a)\) where \(0<s, t<1, s+t\leq1\). Also, note that if we release the constraint \(s+t\leq1\), we get a parallelgram formed by reflecting \(a\) across \(\bar{bc}\). Therefore, we can randomly sample \(s, t\) and if \(s+t > 1\), we reflect it back by \(1-s, 1-t\)
Area Weighted random Sampling of Triangles
Note that the cmf of \(h\) is
Therefore, we can randomly sample \(x\) and find the first value of \(C_i\) s.t. \(C_i > x\)
Point Triangle Distance
Given a query point \(x\in\mathbb R\) and triangle \(T\in \mathbb R^{3\times 3}\) with corners \(a, b,c\). To find \(p\) s.t.
Let \(P\) be the plane that \(T\) belongs to, we can simply define \(P\) from \(T\), but remove the constraints.
Let \(q \in P\) be the point projected from \(x\) to \(P\). Then,
Note that \(x, q\) is fixed, so that we want to minimize \(\|p-q\|\), note that \(p,q\) both line on \(P\), thus this problem becomes a 2D problem on the plane \(P\).
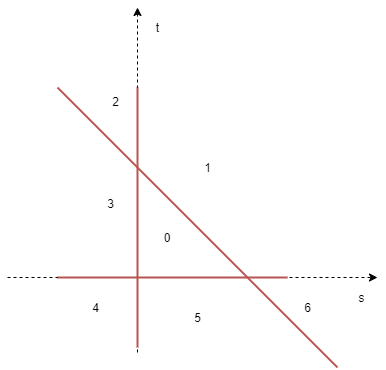
Then, to solve the 2D problem. Note that the regions are divided by \(s=0, t=0, s+t=1\), we can do it case by case. - 0 => within the triangle, done - 1, 3, 5 -> point-line projection, if not on the segment range, then map it to the endpoint - 2, 4, 6 -> directly go to the endpoint
An efficient implementation will try to reduce the number of divisions, so that the relative error is small (See Reference here)