Raster Image
Image
Consider image as function
where \(R\) is the area (in most cases rectangle area) and \(V\) is the set of possible pixel values.
For example, for a grayscale image, \(V= \mathbb R^+\), a.k.a. the brightness.
For a idealized color image, with RGB values at each pixel, then \(V=(\mathbb R^3)^+\)
A raster iamge is then the sample of the continuous image. Each pixel is a sample and the rectangular domain of a \(W\times H\) image is
Pixels and subpixels
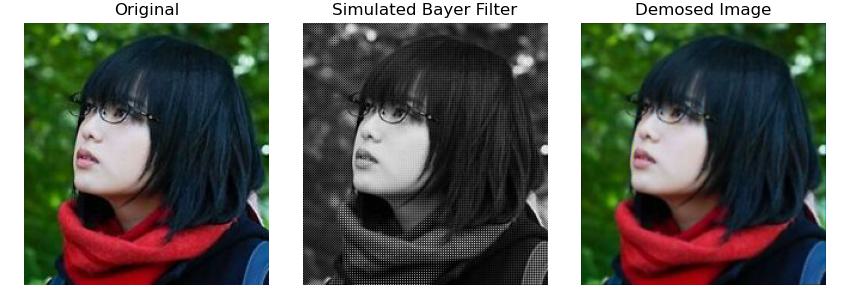
The raw color measurements made by modern digital cameras are typically stored with a single color channel per pixel. This information is stored as a seemingly 1-channel image, but with an understood convention for interpreting each pixel as the red, green or blue intensity value given some pattern. The most common is the Bayer pattern. In this assignment, we'll assume the top left pixel is green, its right neighbor is blue and neighbor below is red, and its kitty-corner neighbor is also green.
To demosaic an image, we would like to create a full rgb image without downsampling the image resolution. So for each pixel, we'll use the exact color sample when it's available and average available neighbors (in all 8 directions) to fill in missing colors. This simple linear interpolation-based method has some blurring artifacts and can be improved with more complex methods.
def simulate_bayer_filter(image):
output = np.empty(image.shape[:2])
output[::2, ::2] = image[::2, ::2, 1]
output[1::2, 1::2] = image[1::2, 1::2, 1]
output[::2, 1::2] = image[::2, 1::2, 0]
output[1::2, ::2] = image[1::2, ::2, 2]
return output
def demosaic(image):
corner_kernel = np.array([[.25, 0, .25],
[0, 0, 0],
[.25, 0, .25]])
cross_kernel = np.array([[0., .25, 0. ],
[.25, 0., .25],
[0., .25, 0. ]])
h_kernel = np.array([[.5, 0., .5]])
v_kernel = h_kernel.T
output = np.empty(list(image.shape) + [3])
# fill in the R value
# if bayer pixel is red, take self
output[::2, 1::2, 0] = image[::2, 1::2]
# if bayer pixel is green,
output[::2, ::2, 0] = convolve2d(image, h_kernel, mode="same")[::2, ::2]
output[1::2, 1::2, 0] = convolve2d(image, v_kernel, mode="same")[1::2, 1::2]
# if bayer pixel is blue, take corners
output[1::2, ::2, 0] = convolve2d(image, corner_kernel, mode="same")[1::2, ::2]
# fill in the G value
# if bayer pixel is red or blue, take the cross
output[::2, 1::2, 1] = convolve2d(image, cross_kernel, mode="same")[::2, 1::2]
output[1::2, ::2, 1] = convolve2d(image, cross_kernel, mode="same")[1::2, ::2]
# if bayer pixel is green, take self
output[::2, ::2, 1] = image[::2, ::2]
output[1::2, 1::2, 1] = image[1::2, 1::2]
# fill in the blue value
# if bayer pixel is red, take corners
output[::2, 1::2, 2] = convolve2d(image, corner_kernel, mode="same")[::2, 1::2]
# if bayer pixel is green. take top and botton neightbors
output[::2, ::2, 2] = convolve2d(image, v_kernel, mode="same")[::2, ::2]
output[1::2, 1::2, 2] = convolve2d(image, h_kernel, mode="same")[1::2, 1::2]
# if bayer pixel is blue, take self
output[1::2, ::2, 2] = image[1::2, ::2]
return output.astype(np.uint8)
Conversion between RGB and HSV
HSV stands for hue, saturation, and value. Is another way of representing an image. Which is to have a more closely align with the way human vision perceives color-making attributes. \(H\in [0, 360]\) is a periodic measurement and \(S\in [0, 1], V\in[0, 1]\)
RGB to HSV
Given RGB values in \([0, 1]^3\),
First calculate the chroma range,
Value
\(V\) is the max of lightness among the RGB channels
Hue
Note that when \(C_{\min} = C_{\max}\Leftrightarrow \Delta = 0\), this means the color is black/white.
Saturation
HSV to RGB
Given \(H\in [0, 360), S, V \in [0,1]\) (Note that since \(H\) is periodic, if \(H\in \mathbb R\), just take mod of 360)
def rgb2hsv(image):
output = np.zeros(image.shape)
if image.dtype == np.uint8:
image = image.astype(float) / 255
r, g, b = image[:, :, 0], image[:, :, 1], image[:, :, 2]
c_max = np.max(image, axis=2)
c_min = np.min(image, axis=2)
delta = c_max - c_min
r_indice = np.logical_and(c_max == r, delta > 0)
output[r_indice, 0] = 60 * ((g[r_indice] - b[r_indice]) / delta[r_indice])
g_indice = np.logical_and(c_max == g, delta > 0)
output[g_indice, 0] = 60 * ((b[g_indice] - r[g_indice]) / delta[g_indice] + 2)
b_indice = np.logical_and(c_max == b, delta > 0)
output[b_indice, 0] = 60 * ((r[b_indice] - g[b_indice]) / delta[b_indice] + 4)
output[:, :, 0] = np.mod(output[:, :, 0], 360)
output[c_max > 0, 1] = delta[c_max > 0] / c_max[c_max > 0]
output[:, :, 2] = c_max
return output
def hsv2rgb(image):
h, s, v = image[:, :, 0], image[:, :, 1], image[:, :, 2]
c = v * s
x = c * (1 - np.abs(np.mod(h/60, 2) - 1))
m = v - c
rgb = np.zeros(image.shape)
cond = np.logical_and(h >= 0, h < 60)
rgb[cond, 0] = c[cond]
rgb[cond, 1] = x[cond]
cond = np.logical_and(h >= 60, h < 120)
rgb[cond, 0] = x[cond]
rgb[cond, 1] = c[cond]
cond = np.logical_and(h >= 120, h < 180)
rgb[cond, 1] = c[cond]
rgb[cond, 2] = x[cond]
cond = np.logical_and(h >= 180, h < 240)
rgb[cond, 1] = x[cond]
rgb[cond, 2] = c[cond]
cond = np.logical_and(h >= 240, h < 300)
rgb[cond, 0] = x[cond]
rgb[cond, 2] = c[cond]
cond = np.logical_and(h >= 300, h <= 360)
rgb[cond, 0] = c[cond]
rgb[cond, 2] = x[cond]
return np.round(255 * (rgb + m[:, :, np.newaxis])).astype(np.uint8)

With HSV images, we can easily tune the lightness, hue, and saturation
def hue_shift(image, shift):
output = image.copy()
output[:, :, 0] = np.mod(output[:, :, 0] + shift, 360)
return output
def saturate_change(image, factor):
output = image.copy()
output[:, :, 1] = np.clip(output[:, :, 1] * (1 + factor), 0, 1)
return output
def lightness_change(image, factor):
output = image.copy()
output[:, :, 2] = np.clip(output[:, :, 2] * (1 + factor), 0, 1)
return output

Alpha Compositing
If we want to composite a foreground color \(c_f\) over background color \(c_b\) , and the fraction of the pixel covered by the foreground is \(\alpha\), then we can use the formula