Hidden Markov Models
A sequential data is a sequence of random states \(x_{1:T}\) where \(x_{i}\)'s aren't i.i.d., but depends on (in most cases, previous) states in the sequence.
Examples of sequential data includes time-series (stock prices, videos) or any ordered sequence (gene sequences, texts).
Of course, this definition gives almost no simplifications over the intractable nature of the joint factorization. Therefore, we need stronger assumptions.
Stationary Markov Chain

For a k-order Markov chain, we assume that for each state \(x_t\), it only depends on the previous \(k\) states, which means
so that the joint distribution becomes
for example, we are interested in first order Markov chains, where each state only depends on its previous state.
As an example, we want to forecast the weather tomorrow, if I only look at today's weather, then it's a first-order markov chain. If today and yesterday, then it's second order.
Stationary Assumption
Further make the stationary assumption, if the distribution generating the data does not change through time, then it is a stationary/homogenous Markov chain. For first order MC, this means that
Parameterizations
Assume for stationary model, and the hidden r.v. \(z\) is discrete, we need to parameterize 1. Initial distribution \(\pi(i) = p(z_1 = i)\). The probability of the first hidden variable being in state \(i\).Obviously we need something to start with. 2. Transition distribution \(T(i,j) = p(x_{t+1}=j|x_t=i)\), the probability of moving from state \(i\) to state \(j\).
Consider a discrete MC with \(K\) states. At each time \(x_t\), it falls onto \(i\in\{1,...,K\}=:\mathcal S\). Thus, to parameterize the distribution over \(X\), we need to parameterize \(K-1\) states since the last states is implicit \(p(x=K|\cdots)=1-\sum_{i=1}^{K-1} p(x=i|\cdots)\).
Then, with the stationary assumption, for a m-order MC, we need to assign the probability
for each \(j,i_1,...,i_m\in \mathcal S\).
Thus, we have \((K-1)K^m\) parameters.
Chapman-Kolmogorov Equations
For first-order MC, consider the transition distribution \(p(x_t = j| x_{t-1} =i)\), which gives the probability (real number) from state \(i\) to state \(j\). Therefore, define the transition matrix
Now, suppose that we want to estimate \(x_{t+2}\) with observed \(x_t\) (\(x_{t+1}\) is unobserved).
Claim (CKE) Define \(A_{ij}(n):= p(x_{t+n}=j|x_t=i)\), then \(A(n) = A(1)^n\).
proof. directly perform induction using the above discovery.
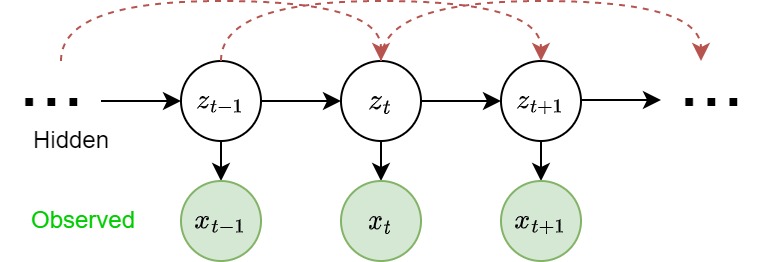
Hidden Markov Models
In some cases, the observed states of a random variable is not the sequence itself, but a consequence of some hidden states. HMMs hide the temporal dependence by keeping it in the unobserved state. For each observation \(x_t\), we associate a corresponding unobserved hidden/latent variable \(z_t\).
The joint distribution of the model is
Unlike simple Markov chains, the observations are not limited by a Markov assumption of any order. I.e. \(x_t\) isn't neceessarily independent of any other observation, no matter how many other observations we make.
Parameterization
In addition to the initial distribution and transition distribution, we need an additional Emission probability
the probability of an observed r.v. \(x\) given the state of hidden varaible that "emitted" it.
Note that with the stationary assumption, we need \(k\) emission probability functions \(\epsilon_i(x)\) for \(i = 1,2,...,k\).
Forward-backward Algorithm
Given observations \(x_{1:T}\), we are interested in estimate the latent sequence \(z_1:T\). That's to compute
for each \(t\). Assuming that the HMM is fully parameterized with initial \(\pi(z_1)\), transition matrix \(p(z_t|z_{t-1})\), and emission \(\epsilon(x_t|z_t)\).
Then, we divide the latent sequence into 3 parts
Filtering \(p(z_t|x_{1:T})\) posterior over current hidden state.
Prediction \(p(z_{t+k}|x_{1:T})\) posterior over future hidden state.
Prediction \(p(z_{t-k}|x_{1:T})\) posterior over past hidden state.
Note that
Forward Recursion
Now consider the forward recursion, we have
where \(A_{ij} = p(z_t=j|z_{t-1}=i)\) is the translation matrix, \(\epsilon_t(j) = p(x_t|z_t=j)=\) is the emission. Thus, we can write it into matrix form
where \(a_t: K\times 1 = [a_t(1), a_t(2), ..., a_t(K)]^\top, \epsilon_t = [\epsilon_t(1), \epsilon_t(2), ..., \epsilon_t(K)]^\top, A:K\times K, A_{ij} = p(x_t = j| x_{t-1} =i)\) and \(\otimes\) denotes element-wise multiplication.
Backward Recursion
Similarly, we have backward recursion
and similarly the matrix form