Decision Trees
make prediction by recursively splitting on different attributes according to a tree structure
Internal nodes: test attributes
Branching: attribute values
Leaf: output (predictions)
NOTE - can have repeated attributes, but not the same attribute values - can be imaged as splitting the space into rectangular subspaces
Classification and Regression
Each path from root to a leaf defines a region \(R_m\) of input space, let \(\{(x^{(m_1)}, t^{(m_1)}), ..., (x^{(m_k)}, t^{(m_k)})\}\) be the training examples that fall into \(R_m\)
Classification Tree set leaf value \(y^m\) be the most common value in \(\{t^{(m_1)}, ..., t^{(m_k)}\}\), hence discrete output
Regression Tree set leaf value \(y^m\) be the mean value in \(\{t^{(m_1)}, ..., t^{(m_k)}\}\), hence continuous output
Learning (Constructing) Decision Trees
Note that learning the simplest decision tree which correctly classifies training set is NPC
General Idea
Greedy heuristic start with empty and complete training set by split on the "best" attribute and recurse on subpartitions
Accuracy (Loss) based
Let loss \(L:=\) misclassification rate, say region \(R\rightarrow R_1, R_2\) based on loss \(L(R)\) and the accuracy gain is \(L(R) - \frac{\|R_1\|L(R_1) + \|R_2\|L(R_2)}{\|R_1\| + \|R_2\|}\)
Problem sometimes loss in misclassfication rate will have reduced uncertainty significantly.
Uncertainty based
Low uncertainty: all examples in leaf have same class
High uncertainty: each class has same amount of examples in leaf
Idea use counts at leaves to define probability distributions, and use information theory to measure uncertainty
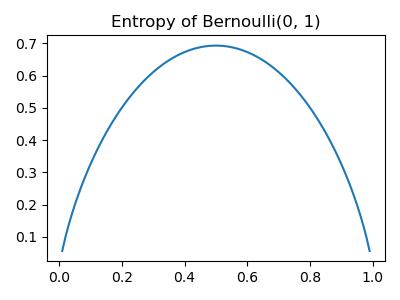
Entropy
measure of expected "surprise", a.k.a. how uncertain are we of the value of a draw from this distribution
Average over information content of each observation
Unit = bits (based on the base of log)
A fair coin flip has 1 bit of entropy, i.e.
Source code
High Entropy
Variable has uniform-ish distribution
Flat histogram
Values sampled from it are less predicatable
Low Entropy
Variable has peaks and valleys
Histogram with low and highs
Values sampled from it are more predicatable
Example
Let X = {Raining, Not raining}, Y = {Cloudy, Not cloudy}
| C | NC | |
|---|---|---|
| R | 24 | 1 |
| NR | 25 | 50 |
entropy of a joint distribution
conditional entropy
Given it is raining, what is the entropy of cloudiness
expected conditional entropy
What is the entropy of cloudiness, given whether it is raining
Properties
for the discrete case
- \(H\geq 0\)
- \(H(X,Y)= H(X\mid Y) + H(Y) = H(Y\mid X) + H(X)\)
- \(X,Y\) indep. \(\Rightarrow H(Y\mid X) = H(Y)\)
- \(H(Y\mid Y) = 0\)
- \(H(Y\mid X)\leq H(Y)\)
Information Gain
In \(Y\) due to \(X\) (or mutual information of \(Y\) and \(X\))is defined as
Since \(H(Y\mid X )\leq H(Y), IG\geq 0\)
\(X\) is completely uninformative about \(Y\Rightarrow IG(Y\mid X)= 0\)
\(X\) is completely informative about \(Y\Rightarrow IG(Y\mid X) = H(Y)\)
Then, foe each decision, we gain some \(X\), so that we can calculate \(IG\)
Algorithm
Start with empty decision tree and complete training set
Split on the most informative attribute (most \(IG\)), partitioning dataset
Recurse on subpartitions
Possible termination condition: end if all examples in current subpartition share the same class
What makes a "Good" tree
Small Tree can't handle important but possibly subtle distinctions in data
Big tree bad computational efficiency, over-fitting, human interpretability
Occam's Razor find the simplest hypothesis that fits the observations
Expressiveness
- Discrete input & output case: can express any function of input attributes
- Continuous input & output: can approximate any function arbitrarily closely
There's a consistent decision tree for any training set with one path to leaf for each example, while won't generalize to new examples
Miscellany
Problems
- exponentially less data at lower levels
- Too big tree => overfit
- Greedy don't necessarily yield the global optimum
- Mistakes at top-level propagate down tree
For continuous attributes, must be split based on thresholds, which is more computational intensive in choosing more parameters
With regression, use MSE as splits instead of IG
Decision Tree vs. kNN
Advantages of Decision Tree
- Good with discrete attributes
- Easily deals with missing values
- Robust to scale of inputs
- Test time is fast
- More interpretable
Advantages of kNN
- Able to handle attributes/feature with interactions in complex ways
- Can incorporate interesting distance measures