Fluid Simulation
Generally, there are two approaches for fluid simulation:
- Grid approach: discretize the 3D field as a grid and save quantities on voxels, the fluids will move through grid and updates quantities accordingly. Easy to scale, but hard to track the surface.
- Particle approach: each particle represents a blob of volume and stores quantities. The fluid behavior is achieved through inter-particle forces. Hard to scale, but easy to track surface.
Grid based Fluid Simulation
For simplicity, assume a 2D simulation, and 3D simulation behaves exactly the same.
For grid-based simulation, we store velocity, pressure, density on a regular grid. Note that pressure and density are scalar fields \(p: \mathbb R^2 \rightarrow \mathbb R\) while velocity is 3D fluid \(\mathbf v: \mathbb R^2\rightarrow\mathbb R^2, \mathbf v(x,y) = (u,v)\).
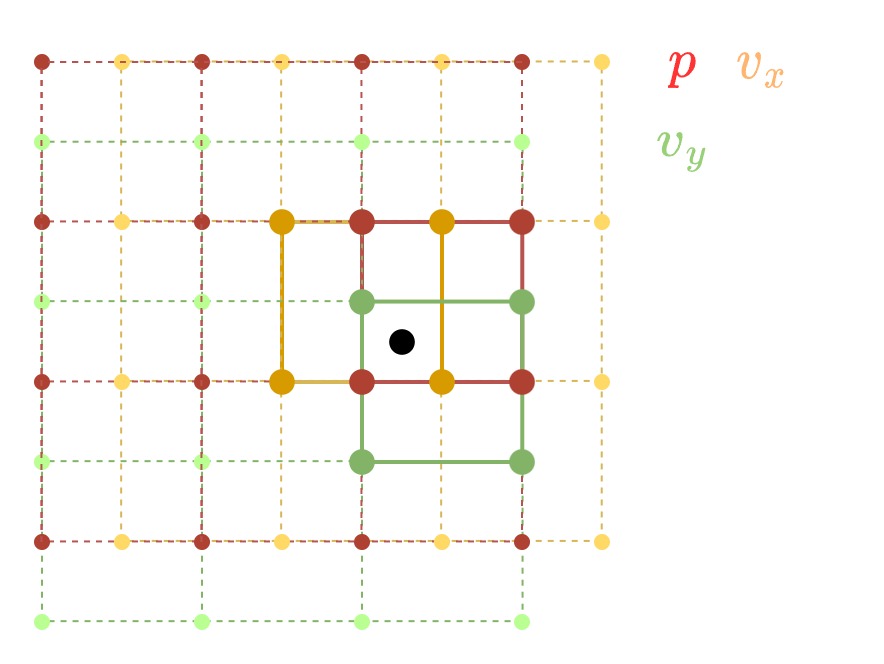
Staggered Grid
Intuitively, we can store all quantities on discretized grid locations, and linearly interpolate the values at any location (lerp from \(2^D\) points), i.e.
where \(i = \lfloor x / dx \rfloor, j = \lfloor y / dy \rfloor\). However, to prevent unstable checkerboard, we use a staggered grid instead. The pressure grid is unchanged, while the velocity is staggered by half, which means that
Vector Field
Define several operators on the vector field.
- gradient for some scalar field \(p\), \(\nabla p = (\partial_x p, \partial_y p)\) is the direction of greatest change in \(p\)
- divergence for some field \(\mathbf v:(x,y)\rightarrow(u,v)\), \(\nabla \cdot \mathbf v = \partial_x u + \partial_y v\) is the net flow of the region near \((x,y)\).
- curl \(\nabla\times \mathbf v = \partial_xv - \partial_yu\) is the circulation around \((x,y)\).
- Laplacian \(\nabla^2 p= \nabla\cdot\nabla p= \frac{\partial^2p}{\partial x^2} + \frac{\partial^2p}{\partial y^2}\) is the difference from the neighborhood average.
- directional derivative \(\nabla_{\mathbf v} \mathbf v = \mathbf v \cdot \nabla \mathbf v\) measures how a quantity changes as point of observation moves
Navier-Stokes Equations
The change in fluid velocity is described as
- \(\nabla_{\mathbf v}\mathbf v\) is the advection
- \(\frac{\nabla p}{\rho}\) is pressure, \(\rho\) is density
- \(\frac{\nu}{\rho}\nabla^2 \mathbf u\) is viscosity, \(\nu\) is the viscosity coefficient
- \(\frac{\mathbf f}{\rho}\) is the external forces on the field
This leads to a forward solver
where we update pressure \(p\) from density \(rho\), then update velocities by N-SE, and update densities from \(\dot{\rho} \propto -(\nabla_{\mathbf v}\rho + \nabla\cdot (\rho\mathbf v))\).
However, iteratively solving the equation (explicit method) will quickly go unstable because pressure waves move fast.
Stable Fluids
Stable Fluids [Stam 1999]1 is an early work that provide a more stable solver for N-SE by making the incompressible assumption.
Incompressible Fluids
We add an additional assumption that the fluid has constant density / volume, which implies that the divergence of flow velocity is \(0\), i.e. \(\nabla\cdot \mathbf v = 0\). Then we separate the problem by taking out advection \(d\mathbf v_a = -dt\nabla_{\mathbf v}\mathbf v\) and pressure projection \(d\mathbf v_p = - dt\frac{\nabla p}{\rho}\). Then, the equation becomes
We separate problem term \(\mathbf v^*\), the unprojected and unadvected velocities, from the rest
The incompressible fluid assumption gives that
we can now solve \(p\) and unproject pressure back to as \(\mathbf v^+ = \mathbf v^* - \frac{dt}{\rho}\nabla^2 p\).
Finally, we can update advection simply by track backward each velocity \(\mathbf v_{i,j}\) for \(dt\), interpolate the values and copy to new location.
-
Stam, J. 1999. Stable fluids. Proceedings of the 26th annual conference on computer graphics and interactive techniques, 121–128. ↩