Variational Inference
Consider the probabilistic model \(p(X,Z)\) where \(x_{1:T}\) are observations and \(z_{1:N}\) are unobserved latent variables.
The conditional distribution we are interested in, or the posterior inference is
At suggested by the integral, this computation is intractable. Thus, we need to estimate the posterior using approximate inference. Thus, we need
- some function family \(q_\phi(z)\) with parameter \(\phi\).
- For example, the normal distribution family, where \(\phi = (\vec \mu, \Sigma)\)
- some distance measurement between \(q_\phi, p_\theta\).
- optimization on the distance to get the best \(\phi\).
Kullback-Leibler Divergence (KL Divergence)
Given the joint distribution \(p(X) = \frac{1}{Z}\tilde p(X)\), we find an approximation function \(q_\phi(X)\) from a class of distribution functions, where \(\phi\) is the parameter. Then, adjust \(\phi\) so that \(p\sim q\). That is
Define the KL divergence be
Properies
Claim 1 \(\forall p, q\) be discrete density functions, \(D_{KL}(q\parallel p) \geq 0\); and \(D_{KL}(q\parallel p) = 0\) IFF \(q=p\).
proof. Consider \(\sum_{\hat x} q(\hat x)\log\frac{q(\hat x)}{p(\hat x)}\) where \(p,q\) are density functions, since we only evaluate on the data samples, it is discrete. Consider \(\hat x\) where \(q(\hat x) > 0\) and denote each of such \(q(\hat x), p(\hat x)\) as \(q_i, p_i\) for simpler notation, then
For equality, we use the fact that \(\log 1 = 0\) for all \(\hat x\) s.t. \(p(\hat x) > 0\), and in the other case we have \(p(\hat x) = 0 \implies q(\hat x) = 0\).
Claim 2 Generally, \(D_{KL}(q\parallel p) \neq D_{KL}(p\parallel q)\).
proof. Quite obvious, since log function is non-linear.
Information Projection vs. Moment Projection
Since \(D_{KL}(q\parallel p) \neq D_{KL}(p\parallel q)\), we have two different measurement. where
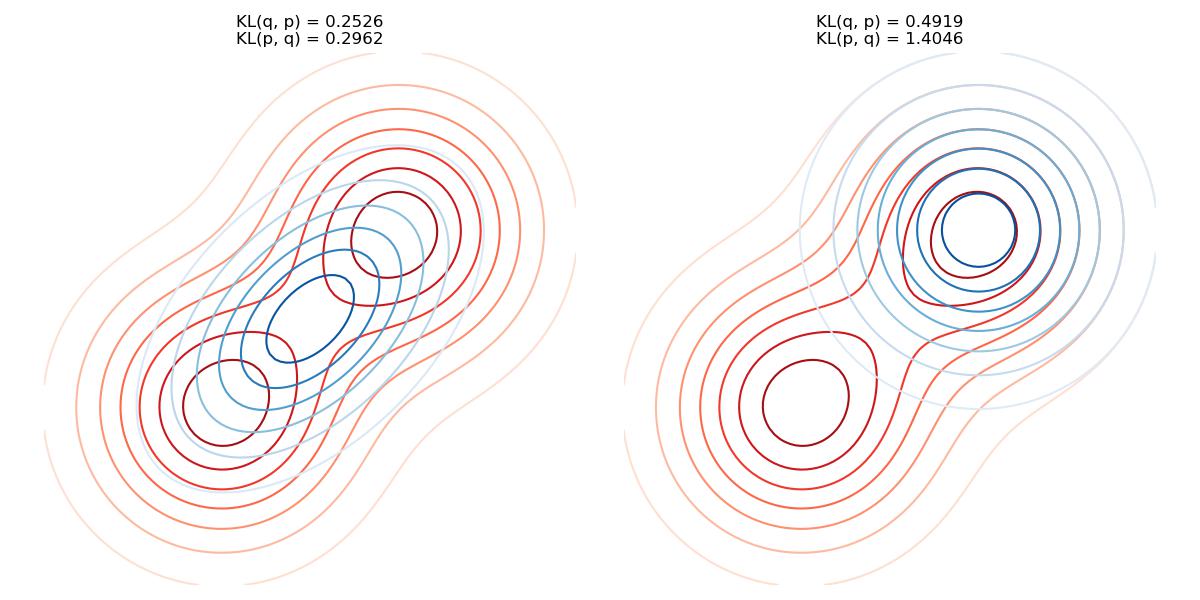
Information Projection optimizes on \(D_{KL}(q\parallel p)\)
Moment Projection optimizes on \(D_{KL}(p\parallel q)\)
First note that when \(p\approx q\), \(\log(q/p) \approx \log(p/q) \approx \log 1 = 0\) thus both projection have small values. However, consider the shape of \(\log(a/b)\), when the denominator is small, it will apply a much larger penalty. Thus, the choice of projection depends on the desired properties of wanted \(q\).
Evidence Lower Bound (ELBO)
Now, consider the optimization problem
Note that
Since \(x\) is observed, \(E_{z\sim q_\theta} p(x)\) is fixed and independent of \(\theta\).
Thus, define the objective function s.t. minimizing \(D_{KL}(q_\theta \parallel p)\) is the same as maximizing
Call \(\mathcal L(\phi)\) ELBO and note that \(-\mathcal L(\phi) + \log p(x) = D_{KL} \geq 0\implies \mathcal L(\phi)\leq \log p(x)\).
Reparameterization Trick
Now consider
and we are optimizing the function by
However, this causes a problem that the expection \(E_{z\sim q_\theta}\) depends on \(q_\theta\), thus we cannot put \(\nabla_\theta\) into the expectation.
Thus, we need to reparameterize the expectation distribution, so that expectation does not depend on \(\phi\). The idea is that we use another random variable \(\epsilon\) from a fixed distribution \(p(\epsilon)\), eg. \(\text{Unif}(0,1)\) or \(N(0,1)\). Then, take some translation function \(T(\epsilon, \phi)\) s.t. \(z =T(\epsilon, \phi) \sim q_\theta(z)\). Thus, we reparameterized the expectation as
Stochasitc Variational Infernce
Look at \(\nabla_\phi \mathcal L = E_{\epsilon\sim p(\epsilon)} \nabla_\phi(\log p(x,T(\epsilon, \phi))-\log q_\theta(T(\epsilon, \phi)))\), it is very similar to the gradient descent problem in neural networks. Thus, similar to SGD, we can do SVI which, at each optimization step, takes a mini-batch to estimate the sample expectation as